Projekt
Ein Blick auf Methodik, Ziele und Instrumentierung des CLOUDLAB Projekts.
CLOUDLAB
Das ETH Projekt CLOUDLAB nutzt Wolken als natürliches Labor, um grundlegende Aspekte der Eisbildung und des Eiswachstums zu erforschen. Dabei werden mit Hilfe einer Drohne Eiskristalle in unterkühlten Stratuswolken (Hochnebel) erzeugt und die dadurch entstehenden mikrophysikalischen Änderungen mit diversen bodengestützten Fernerkundungssytemen und einem Fesselballon gemessen. Das Ziel des CLOUDLAB Projektes ist es mit Hilfe dieser gezielten Wolken-Experimente das grundlegende Verständnis der Eisbildung in Wolken und damit auch die Niederschlagsprognose zu verbessern. Das Ergebnis von CLOUDLAB wird ein multidimensionaler Datensatz aus boden- und luftgestützter Wolkenmessungen sowie Simulationen mit dem Wettervorhersagemodell sein.
Herausforderungen und Design der Experimente
Wolken spielen eine zentrale Rolle in unserem Klimasystem. Sie beeinflussen den Strahlungshaushalt der Atmosphäre und sind ein wichtiger Bestandteil des Wasserkreislaufes. Der Grossteil des Niederschlags bildet sich in Wolken, die Eiskristalle enthalten. Trotz intensiver Forschung sind viele fundamentale Prozesse der Niederschlagsbildung, insbesondere die Bildung und das Wachstum von Eiskristallen, noch nicht vollständig verstanden.
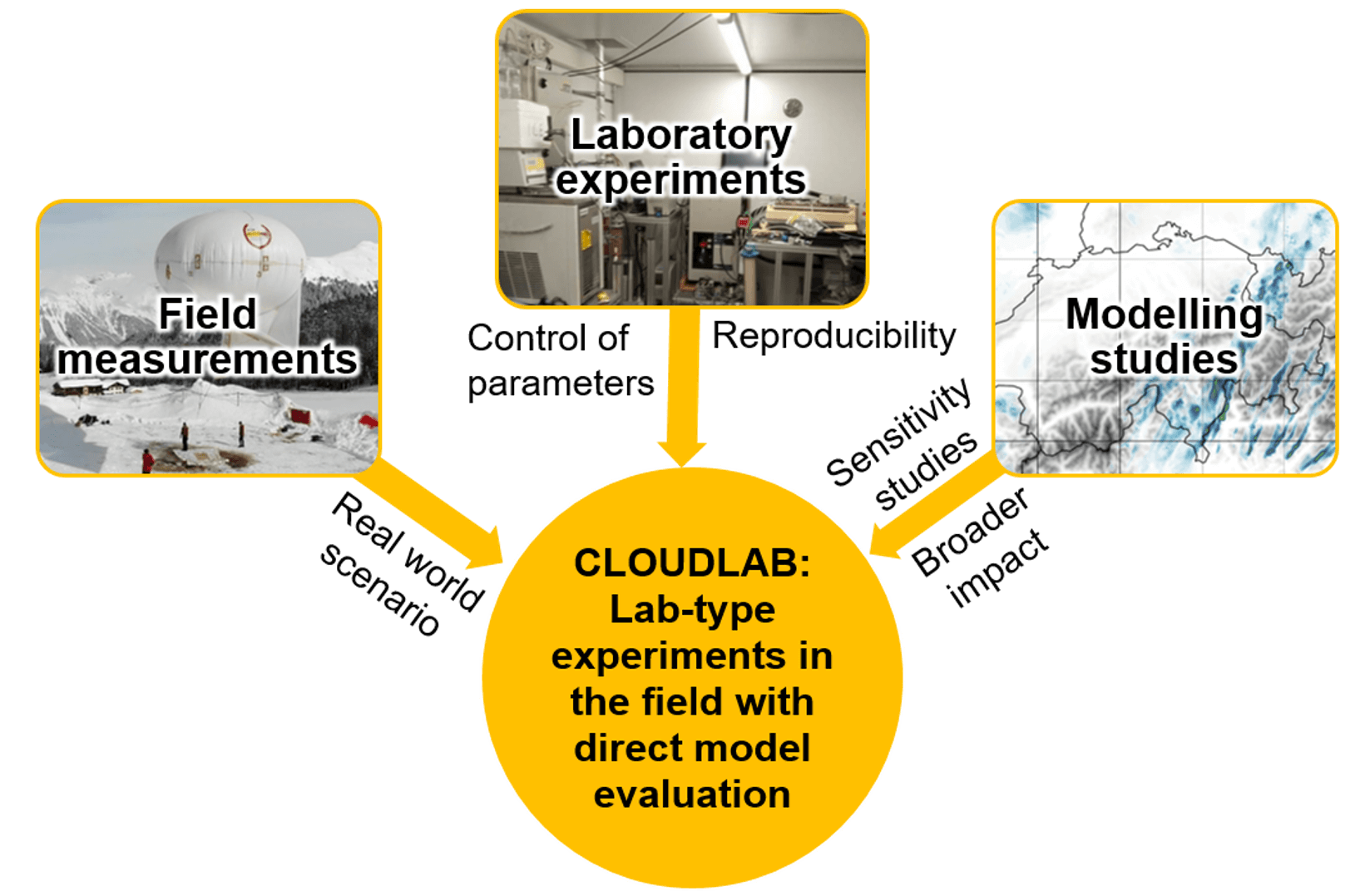
Um diese Lücken zu schliessen, werden in Rahmen des CLOUDLAB-Projekts unterkühlte Stratuswolken (auch sog. Schichtwolken/Hochnebel) als natürliches Labor genutzt, um grundlegende Aspekte der Eisbildung und des Eiswachstums mit Hilfe einer Vielzahl von Instrumenten zu erforschen. Dabei werden von einer Drohne eisbildende Aerosolpartikel in einem kontrollierten Experiment freigesetzt und die dadurch entstehenden mikrophysikalischen Änderungen mit diversen Fernerkundungssystemen und einem Fesselballon gemessen. Stratuswolken sind für unsere Experimente der ideale Wolkentyp, da sie relativ stabil und verhältnismässig homogen sind im Vergleich zu anderen Wolkenarten (z.B. Cumulus). Durch die Langlebigkeit von Stratuswolken bei sich nur langsam ändern Umgebungsbedingungen können zwischen einer Reihe von Experimenten einzelne Parameter (z.B. Partikelkonzentration) variiert werden und somit die Experimente unter ähnlichen und realistischen Anfangsbedingungen wiederholt werden, wodurch die Lücke zwischen Labor- und Feldmessungen geschlossen werden kann.
Ablauf der Experimente
Ein einzelnes Experiment besteht dabei aus zwei Schritten: Im ersten Schritt werden eisbildende Partikel per Drohne in unterkühlten Stratuswolken eingebracht (auf der Luvseite vom Hauptaufbau der Messinstrumente), um so die Bildung und das Wachstum von Eiskristallen zu induzieren. Diese Eiskristalle werden im zweiten Schritt auf der Leeseite von verschiedenen Messsystemen gemessen, darunter ein Wolkenradar, ein holographischer Bildgeber auf einem Fesselballon und eine zweite Drohne. Durch die Variation der Distanz zwischen der Ausbringung der eisbildenden Partikel und der Messung der Eiskristalle können die Prozessraten der Eisbildung und des Eiswachstums direkt bestimmt werden, was wichtige Erkenntnisse über die niederschlagsbildenden Prozesse ermöglicht.
Die Analyse der Wolken-Experimente dient dazu, die Mikrophysik von Wolken im Wettervorhersagemodell ICON (ICOsahedral Non-hydrostatic model; nächste Generation Wettervorhersagemodell der MeteoSchweiz) zu verbessern und damit auch die Niederschlagsprognose. Zuletzt können die Ergebnisse aus dem CLOUDLAB-Projekt wichtig sein, um die Folgen von künstlicher Wetterbeeinflussung und Klimaeingriffen zu quantifizieren.
Messgeräte


Unser UAV von externe Seite Meteomatics ist zwangsweise das wichtigste Gerät in CLOUDLAB, trägt es doch die Silberiodid Fackel von externe Seite Cloud Seeding Technologies welche abbrennt und so die INP in der unterkühlten Wolke freigibt. Diese Fackel wird am Unterboden befestigt und das UAV wird daanach exakt dorthin geflogen wo wir das Seeding starten (basierend auf Windrichtung und -geschwindigkeit, Temperatur und Wolkenstruktur). Zudem können wir Muster unserer Wahl fliegen. Das enthaltene Silberiodid ist ein sehr effizienter INP. Dadurch wird die Eiskristallbildung angestossen und wir messen diese später mit den Geräten am Rapier Platz

Wir haben zwei optische Partikelzähler (eng. Portable Optical Particle Counters (POPS)) im Einsatz welche Aerosolgrösse und -konzentration im Bereich von 120 Nanometer bis 3 Mikrometer messen.
Ein erster POPS befindet sich auf einem der UAVs damit wir Aerosole an verschiedenen Orten und in unterschiedlichen Höhen messen können, inbesondere wenn wir durch die INP Wolke fliegen wollen. Ein zweiter POPS wird jeweils neben HOLIMO mit dem Fesselballoon (TBS) an einer (relativ) fixen Position betrieben. Dies ist besonders hilfreich während der Seeding Experimente da wir damit sofot sehen ob und wann die Eiskristalle am Rapier Platz ankommen.

Ein Hyperspektralsensor wie das AisaFENIX misst hochauflösende Strahlungsintensitäten (Lichtintensität in einer spezifischen Richtung, die durch die Atmosphäre oder Wolken übertragen wird) bei 620 verschiedenen Wellenlängen innerhalb des Spektrums vom sichtbaren Licht bis zum kurzwelligen Infrarot. Wir können die vom AisaFENIX gemessenen spektralen Eigenschaften nutzen, um beispielsweise die Wolkenphase abzuleiten.

HOLIMO (Holographic Imager for Microscopic Objects) ist ein selbst entwickeltes Messinstrument in offener Pfadkonfiguration obasierend auf dem Prinzip der digitalen in-line Holographie. HOLIMO ist ein in situ Messgerät, welches Bilder (Hologramme) in einem definierten Volumen von Wolkepartikelverteilungen (Wolkentröpfchen und Eiskristalle) aufnimmt. Die numerische Auswertung der Hologramme erzeugt zweidimensionale Bilder der Wolkenpartikel mit Grössen von 6 um bis zu mehreren Millimetern. Ab Grössen von über 25 um kann durch die Analyse der Wolkenpartikelform in Wolkentröpfchen (rund) und Eiskristalle (unrund) unterschieden werden. Dadurch wird es ermöglicht räumliche Grössenverteilung und Partikelkonzentrationen getrennt für Wasser- und Eisphase zu erstellen.

HoloBalloon, ist die Kombination aus HOLIMO und einem Fesselballon (200m*3). Die Maximale Flughöhe von HoloBalloon ist 1 km über Grund und wird durch eine V8 Chevy Seilwinde gesteuert. Die HoloBaloon Plattform ist abgesehen von HOLIMO mit zusätzlichem meteorologischen Messinstrumenten ausgestattet um Grössen wir Umgebungstemperatur, relative Luftfeuchte, GPS und Windgeschwindigkeit zu messen. Abgesehen von Flügen auf stationärer Höhe mit HoloBalloon kann man durch den Betrieb mit einer Seilwinde höhenaufgelöste Profile durch Wolken erstellen.
Die Messplatform besteht aus zwei Komponenten: dem frei schwebenden Ballonsystem LaBalloon und der leichten holografischen Kamera HolimoAir. Die Platform wurde in unserem Labor für Lagrange-Wolkenmessungen entwickelt und gebaut. Lagrange-Messungen sind insofern besonders, als das Instrument vom Wind mitgetragen wird und einem Luftpaket folgt. So können wir beobachten, wie sich die Wolkentröpfchen und Eiskristalle in diesem Luftpaket im Laufe der Zeitverändern.
LaBalloon besteht aus einem mit Helium gefüllten Latex-Wetterballon. Am Ballonhals ist ein ferngesteuertes Ventil angebracht. Wenn es geöffnet wird, entweicht Helium aus dem Ballon. Dadurch verringert sich dessen Auftrieb. Ein Steuerungsalgorithmus öffnet und schliesst das Ventil nach dem Start automatisch, damit LaBalloon auf der gewünschten Höhe schwebt. Als Sicherheitsvorkehrung wird das System durch einen Fallschirm kompletiert.
Unterhalb von LaBalloon ist das Leichtgewicht HolimoAir (1,5 kg) angebracht. Mit dem Prinzipt der in-lnline open-path Holografie, nehmen wir 2D-Bilder aller Wolkenpartikel in einem klar abgegrenzrten Volumen auf. Damit erfassen wir die Form, Grösse und Position im Messvolumen von 5.5µm kleinen Wolkentröpfchen bis zu Eiskristallen mit einer Grösse von mehreren Millimetern. Weiter steuert HolimoAir das Ventil von LaBalloon, verfügt über eine GPS-Ortung zum einfachen Auffinden nach der Landung und eine Mobilfunkverbindung zur ständigen Überwachung der Messplatform.

Im Rahmen von CLOUDLAB betreiben wir mehrere Wolkenradare (Millimeterwellenlänge) im Scanning- und/oder Vertikalmodus ( siehe Visualisierung), um zu verstehen, wann gute Seeding-Bedingungen vorherrschen, d.h. ob eine Wolke vor Ort vorhanden ist, wie dick sie ist, wie hoch die Hintergrundreflektivität ist, und um die mikrophysikalischen Veränderungen zu sehen, die durch das Seeding verursacht werden. Zu diesem Zweck können wir auch mit den Radaren "scannen", indem wir Azimut und/oder Elevation variieren. Um die Anwendung typischer Abfragen zu gewährleisten, wird ein Radar immer vertikal gehalten, während wir an unserem Hauptstandort dank unserer Partner vom externe Seite TROPOS mit bis zu zwei Radaren scannen können.
Normalerweise werden Scans entweder als Plan Position Indicator (PPI, variierender Azimut bei fester Elevation) oder als Range Height Indicator (RHI, variierende Elevation bei festem Azimut) durchgeführt, um so zum Beispiel das räumliche Muster der Wolken oder das Windfeld zu ermitteln. Für unsere Seeding-Experimente mit einer Fackel, die etwa sechs Minuten lang brennt, führen wir solche Scans verkürzt, aber wiederholt durch, d.h. entweder in einem begrenzten Azimutbereich bei fester Elevation (partialPPI / sector scan) oder bei festem Azimut und variierender Elevation (elevation scan). Die visualisierten Scans sind auf unserer Quicklook-Website verfügbar und bei einem Experiment innert weniger Minuten erstellt und zur Analyse bereit. In der Regel wiederholen wir die Scans etwa 20 Minuten lang, um einen Eindruck vom Hintergrund vor dem Seeding, vom Seeding-Signal und vom Hintergrund danach zu erhalten. Bei einer Scangeschwindigkeit von 1° pro Sekunde und einem Scanbereich von etwa 90° dauert ein Scan bereits 90 Sekunden, d. h. die sechs Minuten Brenndauer werden durch vier Scans abgedeckt (oder mehr, wenn wir einen kleineren Scanbereich verwenden).
Wenn wir keine Seeding-Experimente durchführen, zeichnen wir natürlich trotzdem Daten auf, und dank der unterschiedlichen Frequenzen können wir auch Vergleiche zwischen den Radargeräten selbst durchführen. Die Wellenlängen und die Anzahl der Radare, die wir betreiben, sind wie dabei folgt:
- scannendes Ka-Band-Radar (Metek Mira, 35 GHz Frequenz/8 mm Wellenlänge), bis 2024 verfügbar
- vertikal ausgerichtetes und scannendes W-Band-Radar (RPG FMCW, 94 GHz Frequenz/3 mm Wellenlänge)
- scannendes X-Band-Radar (Prosensing SSXPOL, 9 GHz Frequenz/33 mm Wellenlänge), nur für den Winter 2023/2024 verfügbar
Vor Ort haben wir ein Lidar mit einer Wellenlänge (940 nm) installiert, das oft auch einfach Ceilometer genannt wird, um auch die Wolkenbasis (und die planetarische Grenzschicht auf der Grundlage der Aerosolkonzentrationen) zu erfassen. Dieses CHM15k Ceilometer von Lufft läuft kontinuierlich mit einer Abtastzeit von 15 Sekunden, rund um die Uhr und 365 Tage im Jahr mit minimaler Wartung. Es ergänzt die Wolkenradarmessungen und liefert Informationen darüber, wie die flüssigen Wassertröpfchen in der Wolke aussehen und wann die Wolkenbasis zu niedrig für die Erkennung durch das Wolkenradar ist.
Weiterhin betreiben die TROPOS Partner ein externe Seite Lidar mit zwei Wellenlängen um damit noch mehr über Aerosole zu erfahren.

Ein Mikrowellenradiometer ist in der Lage, ein vertikales Temperatur- (und Feuchtigkeits-) Profil aus jeweils sieben Kanälen unterschiedlicher Wellenlänge abzuleiten. Dies ermöglicht es uns, auch einen Flüssigwasserpfad (die Wassermenge in der gesamten Luftsäule) zu erhalten. Daraus lässt sich wiederum der Flüssigwassergehalt (Menge an Wasser pro Kubikmeter) der Wolke ableiten.

Unser Disdrometer ist ein externe Seite Parsivel von Ott Hydromet. Das Messprinzip basiert darauf, dass Tröpfchen durch einen Laserpfad fallen und dabei detektiert werden. Aus der Zeit und Abdeckung des Lasers ergibt sich Fallgeschwindigkeit und Grösse. Aus diesen Werten kann danach eine Regenrate abgeleitet werden die wiederrum einer Radarreflektivität entspricht und als "Groundtruth" für die Kalibrierung der Wolkenradar verwendet werden kann.

Wir verwenden das numerische Wettermodell ICON (externe Seite https://gitlab.dkrz.de/icon/icon-model), das gemeinsam von DWD, MPI-M, MeteoSchweiz und ETH entwickelt wird. Die einzigartige Gitterstruktur des Modells erlaubt flexible Anpassungen bezüglich der horizontalen Auflösung im Vergleich zu rechteckigen Gittern traditioneller Wettermodelle. Im Rahmen von CLOUDLAB benötigen wir ein hochaufgelöstes Gitter mit Auflösungen bis zu 65 m um die durchgeführten Seeding-Experimente im Modell zu simulieren. Wir haben ebenfalls eine moderne Parametrisierung (Marcolli et al., 2016) für die Seeding-Partikel eingeführt, um die Eisphase innerhalb der simulierten Wolke schneller zu initiieren und zu wachsen lassen. Der einzigartige Datensatz aus den Feldexperimenten ermöglicht einen direkten Vergleich zwischen Modell und Beobachtung und gibt Hinweise auf Limitationen des Modells bzw. einzelner Prozesse.